
January 23, 2023
本案例研究强调了Multicoreware在为我们的一个客户开发ADAS应用的汽车雷达的感知算法中的作用。
客户
该客户是一家全球性的技术公司,为汽车、航空、工业和越野车开发传感器和基于传感器的解决方案。该客户正在为越野车开发自主导航解决方案,包括其软件处理管道。
目标
设计一种算法,使用雷达和IMU测量来创建环境的静态地图并定位自我的车辆。为此,需要识别环境中的静态和移动物体。静态物体需要用3维边界盒来表示。定位过程必须估计自我车辆的位置(x、y、z坐标)和方向(滚动、倾斜、偏航)。
约束条件
以下是制约因素:
- 该算法必须为在越野情况下获得的雷达和IMU测量值量身定做。
- 假设雷达和IMU的测量值不是时间同步的。
- 该算法的计算复杂度必须是最小的。
传感器
4D成像雷达和IMU
技术
同时进行定位和测绘
场景
大型车辆,越野自动驾驶汽车
方法
Multicoreware从头开始监督研发,我们评估了三种方法来解决客户的问题。正在研究的方法是:
- 基于粒子过滤器和卡尔曼过滤器的SLAM算法
- 基于迭代最接近点匹配的扫描匹配算法
- 雷达-陀螺仪融合算法
雷达-陀螺仪融合算法
- 客户首选的方法得到了实施
- 该方法在精度与延迟的权衡方面具有最佳效益
- 雷达–用于估计自我车辆的平移运动和静态映射
- GYRO–用于估计自我车辆的旋转运动和它的方向。
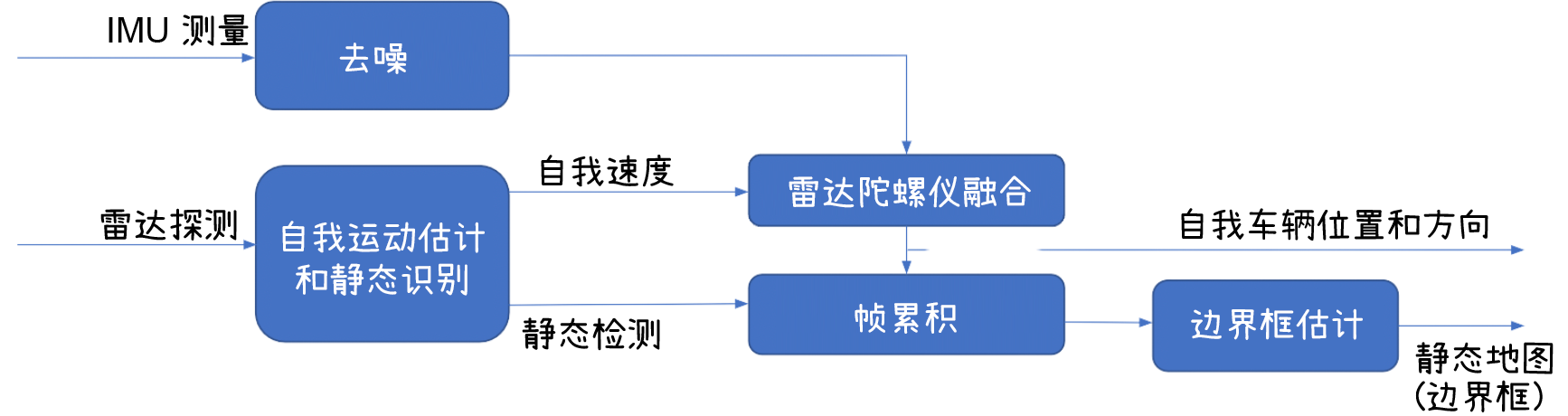
图1:基于雷达-陀螺仪融合的定位和测绘的高层次架构
Multicoreware的优势
Multicoreware拥有一支强大的团队,他们在基础研发方面具有丰富的经验,并且了解最先进的雷达方法。我们与全球各地的 雷达专家合作,为客户提供了价值,使我们能够为客户的挑战提出多种解决方案,并提供在现场测试的原型解决方案。Multicoreware在这个项目中超出了客户的预期。该客户渴望在涉及雷达算法和感知堆栈的类似和更大的挑战中工作。
成果
通过雷达-陀螺仪融合算法,实现了小于1米的定位误差。


